![] DRIMers [...](https://blogger.googleusercontent.com/img/b/R29vZ2xl/AVvXsEjHvQHa8CBSYsgiF9DVdrBSwgWrE6EfSLKnKgxTC_bWLe2qxPrjPmw0HrQ88UcPAHlB6SaaCAzbvmKJ1xw1iHf3Iccl6ToyhlfGodd28ME-O7xui3MPdAhDRx2M1_fVTsp-QCBj0a9weZE/s1600-r/PastedGraphic-6.jpg)
Vous connaissez déjà le principe des sonars qui utilisent le son comme moyen de repérage en navigation. Il est à la base de technologies innombrables, y compris les appareils d'échographie médicale. Mais lorsqu'il s'agit de sonars plus précis et d'ultrasons, les "biosonars" naturels observés chez les animaux paraissent encore bien plus performants que ceux reproduits mécaniquement chez l'homme, à des fins stratégiques.
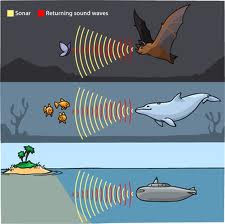
Mais plus pour longtemps. En effet, les professeurs N.Intrator et J.Simmons de l'université de Tel Aviv sont parvenus à identifier dans le cadre d'études sur les chauves-souris, les dauphins et les rats taupes, les éléments qui donnent l'avantage du "biosonar" devant le sonar technologique. En utilisant une méthode particulière pour mesurer comment les animaux interprétaient les signaux de retour, ils ont déterminé que la clef de ce succès résidait dans la qualité du traitement des données, du signal en temps réel. Pr N.Intrator en vient à déclarer:" les écholocations animales se font en quelques fractions de millisecondes, à une résolution si élevée que le dauphin peut voir une balle de tennis à partir d'environ 260 pieds plus loin[...] avec l'écholocation la chauve-souris peut faire la différence entre une mouche en mouvement ou au repos, ou de déterminer lequel des deux fruits est le plus lourd en observant leur mouvement dans le vent", en sachant que les animaux sont tout à fait habilités à traiter plusieurs informations simultanément.
Leur intelligence n'est donc plus à démontrer. Mais, venons-y, parlons un peu plus technique, de notre technique. Intrigués par la qualité du biosonar du monde naturels ces deux chercheurs se sont mis à étudier leur précision: en utilisant un système électronique, ils ont modifié la fréquence et le niveau sonore de l'écho. En manipulant cet écho, ils ont pu déterminer quels facteurs du signal retour permet aux animaux une analyse optimale.
Nos chercheurs ont crée des modèles mathématiques, impliquant l'apprentissage machine et de traitement du signal qui améliorera ainsi notre capacité à interpréter les échos. Ceci mènera donc à une écholocation beaucoup plus précise en résistant mieux au bruit de fond.
De plus, si l'on souhaite élargir la résolution de ce problème, nous serons bientôt capables de détecter précocement des défauts dans des embryons ou la détection non invasive des tumeurs cancéreuses. Mieux encore et surtout beaucoup plus intéressant, la nouvelle génération d'appareils à ultrasons pourrait enfin se substituer aux appareils IRM ou CT qui sont grands, coûteux et dont les radiations émises sont souvent dangereuses pour la santé. Très bonne nouvelle donc pour nous patients, qui pourrons bénéficier d'une technologie de pointe au service de notre guérison, et sans dommages à long termes. Affaire à suivre...
Merci de votre lecture,
Romain MARCELIS.